项目背景
为响应水下装备系统研制数字化转型及装备系统数字样机建设的需要,以某型号水下无人航行器
(Underwater Unmanned Vehicle,UUV)为例,构建UUV数字样机1.0功能模型。针对以往研制流程中存在的任务指标分解缺失、
重原理设计而轻运行分析、专业协调性差、综合集成能力低等问题,应用基于模型的系统工程MBSE方法,开展对UUV模型研制数字化的探索,在已有UUV研制成果的基础上构建数字样机设计中的需求模型与功能模型。通过UUV数字样机研制过程中的设计要求追溯、行为功能分析、系统架构设计、指标参数与运行场景仿真验证等环节,实现 UUV数字样机研制过程中验证与设计的快速迭代,明确各环节所需模型的表达方式,形成兼顾设计规范性和科研创新性的UUV数字样机研发的范例。

解决方案

基于完全自主知识产权的系统设计建模软件工具M-Design及MBSE的RFLP过程框架,结合UUV领域知识可建立与设计要求模型关联追溯的UUV数字样机的功能模型。在UUV装备系统架构设计方案模型的基础上开展功能模型的逻辑仿真,实现设计方案与功能逻辑的实时交互验证,为后续与多学科性能模型的联合仿真验证以及数字样机模型的数据传递打下基础。
◆ 设计要求追溯
设计要求模型是从任务书中提取并分解形成的层级化结构的(总体、分系统、组部件)需求模型。针对不同层级需求,在装备系统架构上构建相应的层级化指标体系并建立关联追溯关系,以多种视图(需求图、追溯图、追溯矩阵等)的方式进行呈现,便于后续开展的影响变更分析。
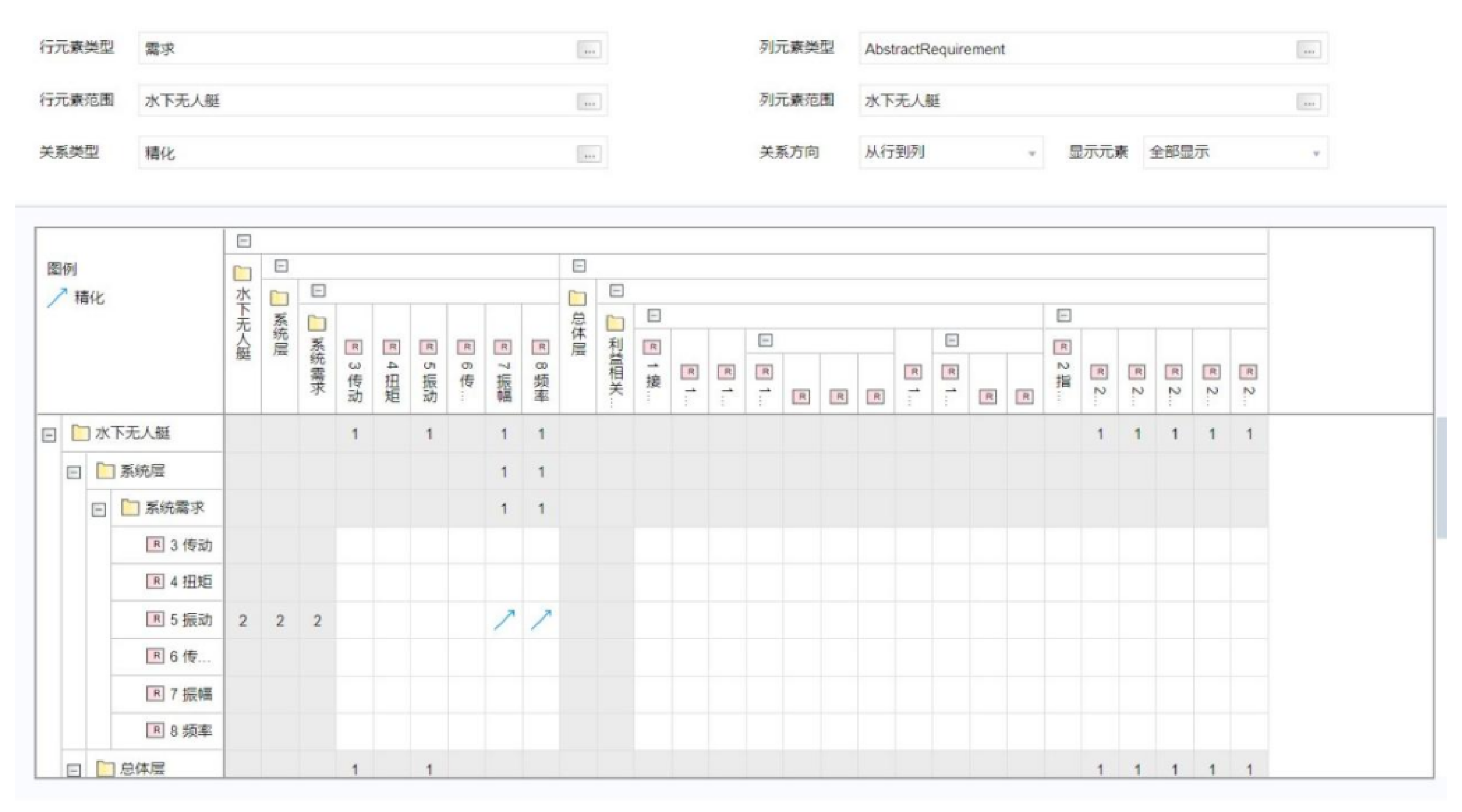
分析设计要求示意图
◆ 行为功能分析
基于已有的UUV各分系统、组部件的工作原理将用例进行展开,以活动图中的动作次序来表征其工作流程并形成相应的功能描述,以便后续仿真验证设计原理的逻辑和搭建UUV的功能架构。
通过明晰各层级的工作原理以及不同的运行状态,采用状态机图表征各分系统、组部件在不同任务场景、不同限制条件下的运行状态,以便后续仿真验证设备在不同场景中的运行逻辑。
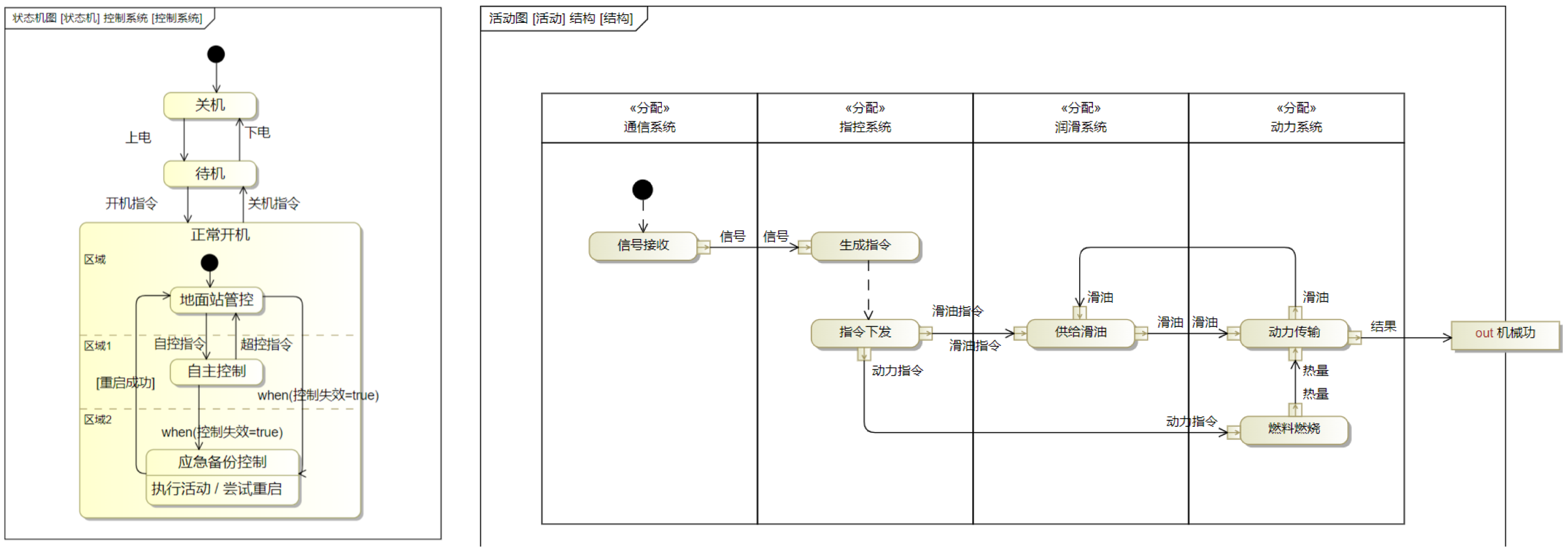
运行逻辑示意图
◆ 系统架构设计
系统架构模型旨在承载已有的设计成果,通过模型固有的统一性来规范引导设计的表达。针对专业协调性差、综合集成能力低的研制现状,通过层级划分出清楚的系统架构。基于模型的数据统一性,开展装备系统接口以及通信协议的梳理,同时承载任务要求指标体系并与需求形成关联追溯。架构也可被转化为模型库支持复用,成为数字样机后续各类模型数据传递的规范性通道。
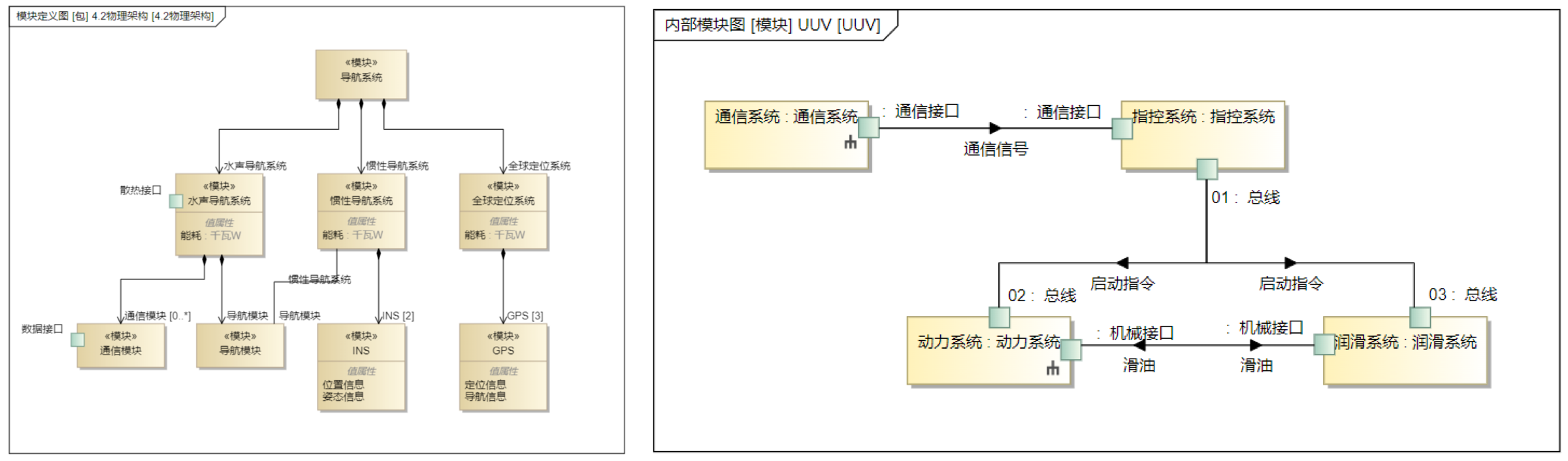
内部模块建模示意图
◆ 场景仿真验证
仿真验证阶段的任务是在行为功能与架构设计的基础上,验证系统设备的工作原理以及各种设备在不同场景与限制条件下的运行状态,为后续进一步开展UUV详细设计的论证提供基础。
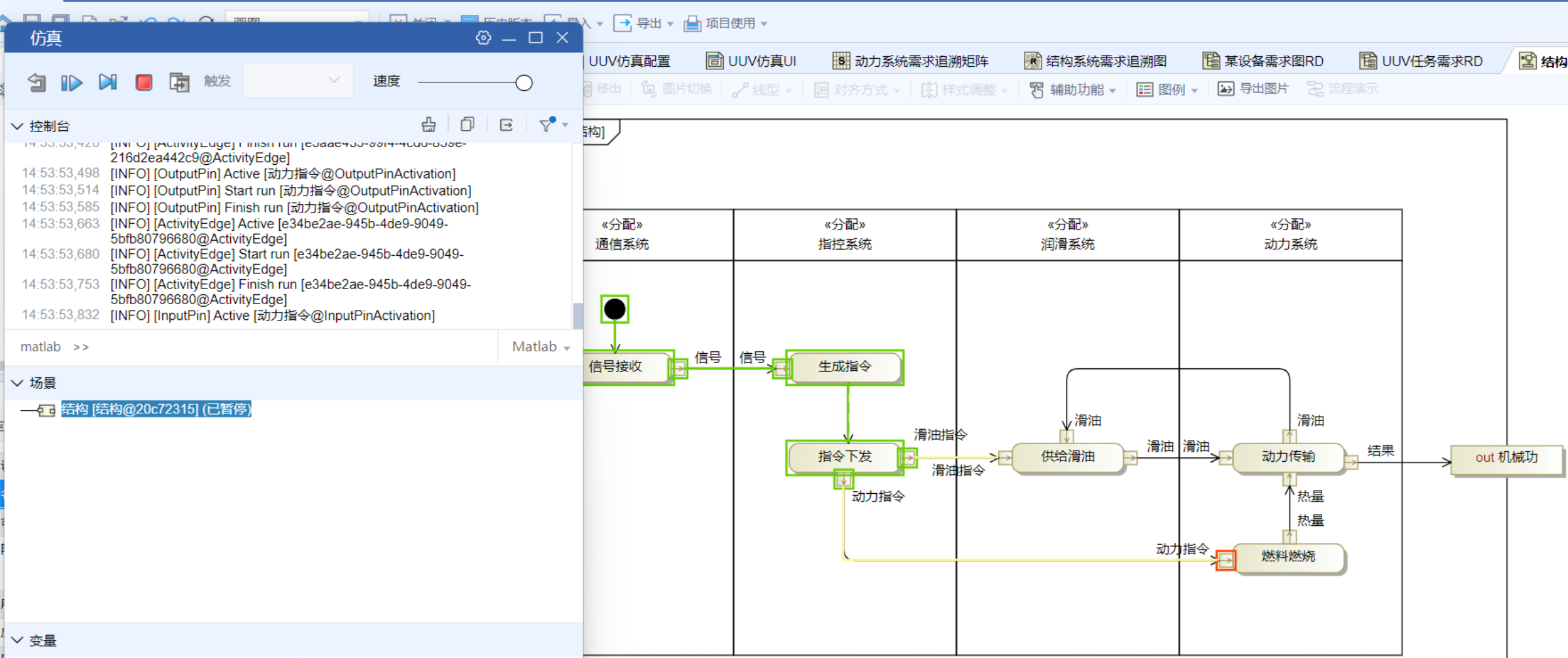
仿真界面图
案例成效
基于M-Design系统建模软件工具搭建了UUV装备系统数字样机1.0中的设计要求模型和功能模型,通过集成仿真验证了装备系统的原理逻辑与不同场景下的运行逻辑,实现了设计方案的模型化与仿真验证的快速迭代,形成了UUV数字样机1.0的研制范例,为后续数字样机多模型集成与验证奠定了可靠的基础。









'%20fill-opacity='1.000000'/%3e%3crect%20id='矩形'%20x='0.500000'%20y='0.500000'%20rx='2.000000'%20width='103.000000'%20height='35.000000'%20stroke='%232671E3'%20stroke-opacity='0'%20stroke-width='1.000000'/%3e%3cpath%20id='产品试用'%20d='M26.24%2012.11L32.18%2012.11L32.18%2013.38L18.03%2013.38L18.03%2012.11L24.76%2012.11C24.51%2011.53%2024.08%2010.81%2023.66%2010.29L24.98%209.91C25.52%2010.58%2026.09%2011.48%2026.33%2012.07L26.24%2012.11ZM69.2%2013.67L69.2%2014.95L65.53%2014.95C65.82%2020.46%2066.52%2024.53%2067.64%2024.58C67.94%2024.6%2068.16%2023.59%2068.27%2021.84C68.52%2022.12%2069.09%2022.44%2069.33%2022.56C68.97%2025.57%2068.29%2026.33%2067.6%2026.33C65.39%2026.27%2064.54%2021.68%2064.22%2014.95L58.24%2014.95L58.24%2013.67L64.16%2013.67C64.11%2012.5%2064.07%2011.3%2064.05%2010.02L65.39%2010.02C65.41%2011.28%2065.42%2012.5%2065.48%2013.67L69.2%2013.67ZM66.84%2010.16C67.6%2010.92%2068.47%2011.97%2068.84%2012.65L67.87%2013.31C67.51%2012.59%2066.68%2011.51%2065.93%2010.72L66.84%2010.16ZM55.09%2010.31C56.03%2011.05%2057.18%2012.14%2057.74%2012.84L56.8%2013.76C56.26%2013.02%2055.13%2011.89%2054.21%2011.1L55.09%2010.31ZM38.15%2010.7L47.94%2010.7L47.94%2016.66L38.15%2016.66L38.15%2010.7ZM72.8%2011.21L85.91%2011.21L85.91%2024.56C85.91%2025.43%2085.67%2025.82%2085.1%2026.06C84.48%2026.27%2083.44%2026.29%2081.75%2026.27C81.69%2025.91%2081.48%2025.34%2081.3%2024.98C82.37%2025.02%2083.42%2025.02%2083.9%2025.01C83.99%2025.01%2084.06%2025.01%2084.11%2025.01C84.47%2025%2084.59%2024.89%2084.59%2024.55L84.59%2020.89L79.75%2020.89L79.75%2026.2L78.42%2026.2L78.42%2020.89L73.92%2020.89C73.65%2022.89%2073.04%2024.94%2071.67%2026.47C71.47%2026.2%2070.93%2025.75%2070.64%2025.59C72.62%2023.36%2072.8%2020.19%2072.8%2017.69L72.8%2011.21ZM39.45%2015.38L46.59%2015.38L46.59%2011.98L39.45%2011.98L39.45%2015.38ZM78.42%2015.37L78.42%2012.48L74.12%2012.48L74.12%2015.37L78.42%2015.37ZM79.75%2015.37L84.59%2015.37L84.59%2012.48L79.75%2012.48L79.75%2015.37ZM21.92%2013.55C22.53%2014.3%2023.19%2015.37%2023.5%2016.07L22.28%2016.61C22.01%2015.91%2021.36%2014.83%2020.76%2014.01L21.92%2013.55ZM28.25%2016.66L32.65%2016.66L32.65%2017.95L19.67%2017.95L19.67%2019.15C19.67%2021.27%2019.34%2024.38%2017.81%2026.51C17.58%2026.26%2016.98%2025.73%2016.72%2025.57C18.12%2023.65%2018.3%2021%2018.3%2019.11L18.3%2016.66L26.9%2016.66C27.41%2015.83%2028.04%2014.54%2028.36%2013.64L29.8%2014.11C29.31%2014.97%2028.76%2015.91%2028.25%2016.66ZM56.71%2015.56L56.71%2023.36L58.69%2022.08C58.76%2022.42%2058.93%2022.93%2059.05%2023.19C56.01%2025.26%2055.54%2025.57%2055.25%2025.91C55.15%2025.57%2054.82%2025.01%2054.57%2024.74C54.91%2024.53%2055.43%2024.04%2055.43%2023.27L55.43%2016.84L52.97%2016.84L52.97%2015.56L56.71%2015.56ZM74.12%2017.69C74.12%2018.28%2074.1%2018.95%2074.05%2019.61L78.42%2019.61L78.42%2016.62L74.12%2016.62L74.12%2017.69ZM79.75%2016.62L79.75%2019.61L84.59%2019.61L84.59%2016.62L79.75%2016.62ZM63.61%2018.79L61.93%2018.79L61.93%2022.93C62.6%2022.75%2063.32%2022.55%2064.02%2022.35L64.2%2023.54C62.33%2024.09%2060.35%2024.65%2058.85%2025.1L58.49%2023.84C59.11%2023.7%2059.86%2023.5%2060.69%2023.29L60.69%2018.79L58.82%2018.79L58.82%2017.54L63.61%2017.54L63.61%2018.79ZM36.82%2026.38L35.54%2026.38L35.54%2018.55L41.9%2018.55L41.9%2026.22L40.58%2026.22L40.58%2025.41L36.82%2025.41L36.82%2026.38ZM43.86%2026.38L43.86%2018.55L50.55%2018.55L50.55%2026.26L49.24%2026.26L49.24%2025.41L45.16%2025.41L45.16%2026.38L43.86%2026.38ZM40.58%2024.11L40.58%2019.85L36.82%2019.85L36.82%2024.11L40.58%2024.11ZM45.16%2019.85L45.16%2024.11L49.24%2024.11L49.24%2019.85L45.16%2019.85Z'%20fill='%23FFFFFF'%20fill-opacity='1.000000'%20fill-rule='evenodd'/%3e%3c/svg%3e)

























'%3e%3cg%20id='编组-22'%20transform='translate(0,%204582)'%3e%3cg%20id='编组-160'%20transform='translate(0,%20214)'%3e%3cg%20id='编组-156'%20transform='translate(359,%2025)'%3e%3cg%20id='编组-155'%20transform='translate(0,%201)'%3e%3crect%20id='矩形'%20x='0'%20y='0'%20width='20'%20height='20'%3e%3c/rect%3e%3cg%20id='编组-154'%20transform='translate(0.625,%202.5)'%3e%3cpath%20d='M4.42882312,0.15788524%20L0.319305493,4.53789865%20C0.139507436,4.72953134%200.138726351,5.02764048%200.317517741,5.22021272%20L9.0301449,14.6043901%20C9.21803179,14.8067588%209.53439653,14.8184988%209.73676532,14.6306119%20C9.74611882,14.6219277%209.75513637,14.6128886%209.76379816,14.6035144%20L18.4360832,5.217957%20C18.6132648,5.02620271%2018.6130859,4.73040559%2018.4356725,4.53886574%20L14.3799728,0.160232407%20C14.2853464,0.0580714086%2014.152403,-2.13500386e-15%2014.0131513,-2.10942375e-15%20L4.79345648,-2.77555756e-16%20C4.65532074,-2.52180632e-16%204.52333967,0.05714744%204.42882312,0.15788524%20Z'%20id='路径-6'%20fill='url(%23linearGradient-1)'%3e%3c/path%3e%3cpath%20d='M6.25,5%20C7.27237006,6.21934804%208.29474012,7.43869608%209.31711018,8.65804412%20C9.35259438,8.70036499%209.41566785,8.70590721%209.45798872,8.67042301%20C9.46262372,8.66653676%209.46689656,8.662238%209.47075471,8.65757959%20L12.5,5%20L12.5,5'%20id='路径-7'%20stroke='%23FFFFFF'%20stroke-linecap='round'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 国内高端MBSE解决方案
国内高端MBSE解决方案 
